Tags
Geometric Jacobian V.S. analytical Jacobian
24 Friday Apr 2015
Posted in Robotics

24 Friday Apr 2015
Posted in Robotics
Tags
09 Friday May 2014
Posted in Robotics
Tags
The orientation error vector is defined as
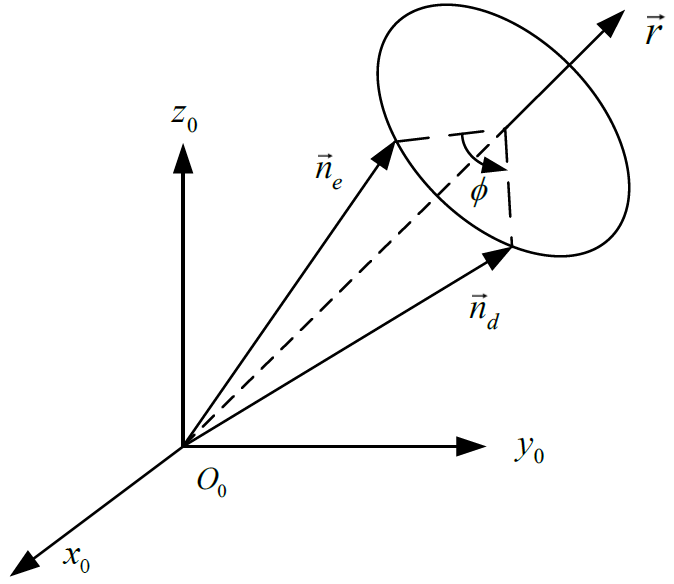
Illustration of the orientation error vector
Reference: Luh, J.Y.S. et al, “Resolved-acceleration control of mechanical manipulators,” IEEE Trans. Automat. Contr., vol.25, no.3, pp.468-474, 1980.

