Tags
The orientation error vector is defined as

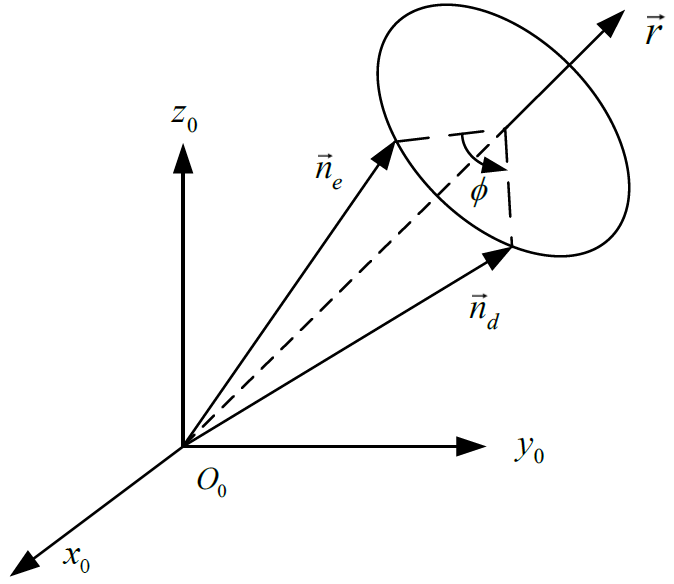
Illustration of the orientation error vector
Reference: Luh, J.Y.S. et al, “Resolved-acceleration control of mechanical manipulators,” IEEE Trans. Automat. Contr., vol.25, no.3, pp.468-474, 1980.

09 Friday May 2014
Posted in Robotics
Tags
The orientation error vector is defined as
Illustration of the orientation error vector
Reference: Luh, J.Y.S. et al, “Resolved-acceleration control of mechanical manipulators,” IEEE Trans. Automat. Contr., vol.25, no.3, pp.468-474, 1980.
